lamprey
A spiking model of lamprey swimming locomotion. A 3D central pattern generator (CPG) drives 10D muscle tensions through a basis-function decoding, reproducing the traveling-wave undulation pattern of real lampreys.
Description
This is the lamprey control module from the Neural Engineering Framework (Eliasmith & Anderson, 2003), implemented in modern Nengo. Originally written by Michael Furlong and Chris Eliasmith at the 2019 Nengo Summer School and migrated to the NengoZoo from nengo/nengo-examples.
The model has three pieces:
- CPG ensemble — 500 spiking neurons representing a 3D state, with recurrent dynamics shaped as a damped harmonic oscillator at ~3 Hz. A brief 1-second "kick" stimulus pushes the state off the origin; the dynamics then sustain a stable limit-cycle oscillation indefinitely.
- Tension decoding — the 3D CPG state is mapped to 10 muscle-tension values along the lamprey's body via a basis-function decoding (
T(x)). Adjacent body segments are phase-shifted, producing the traveling wave. - Body — a
Lampreynode consumes the 10 tensions, computes the resulting body shape, and (optionally) renders an SVG visualization for NengoGUI.
Installation
We recommend a fresh virtual environment to avoid Nengo/NumPy version conflicts with your global Python install:
python -m venv .venv
source .venv/bin/activate # Windows: .venv\Scripts\activate
pip install -r requirements.txt
Usage
from lamprey import build_model
model = build_model(seed=1)
# `model` is a nengo.Network with attached probes on the CPG and tensions.
See examples/run.py for a complete simulation that produces the headline figures (tension waveforms + body snapshots).
For the original NengoGUI-compatible script (with embedded SVG visualization), see examples/nengogui/lamprey_model.py.
How it works
The CPG ensemble a has recurrent dynamics
da/dt ≈ (1/τ) · ( τ · M_d · a + 0.05 · a )
where M_d is a 3×3 matrix encoding a damped oscillator at frequency freq_hz with damping damp0. With the 1.05·a term overcoming the damping slightly, the system has an asymptotically stable limit cycle once kicked off the origin.
The tension decoding uses a Galerkin-projection-style basis with phi(z, m) Gaussians at positions m/10 along the body and Phi(z) = [1, sin(2πz), cos(2πz), sin(4πz)] as the temporal basis. The Gamma matrix and its pseudo-inverse give the change of basis, and Z_mat evaluates the spatial basis at 10 segment positions to produce the final tensions.
Citation
@book{eliasmith2003neural,
author = {Eliasmith, Chris and Anderson, Charles H.},
title = {Neural Engineering: Computation, Representation, and Dynamics in Neurobiological Systems},
publisher = {MIT Press},
year = {2003}
}
Original implementation: Michael Furlong & Chris Eliasmith, Nengo Summer School 2019.
License
GPLv2 (see LICENSE). Matches Nengo's license.
Figures

Body-curvature snapshots at six evenly-spaced times across one full oscillation cycle (~1.4 s). Each panel plots curvature along the body's normalized length (0 = head, 1 = tail). The peak/trough propagates head-to-tail — the traveling-wave undulation pattern that drives lamprey swimming.
Generated by examples/run.py.
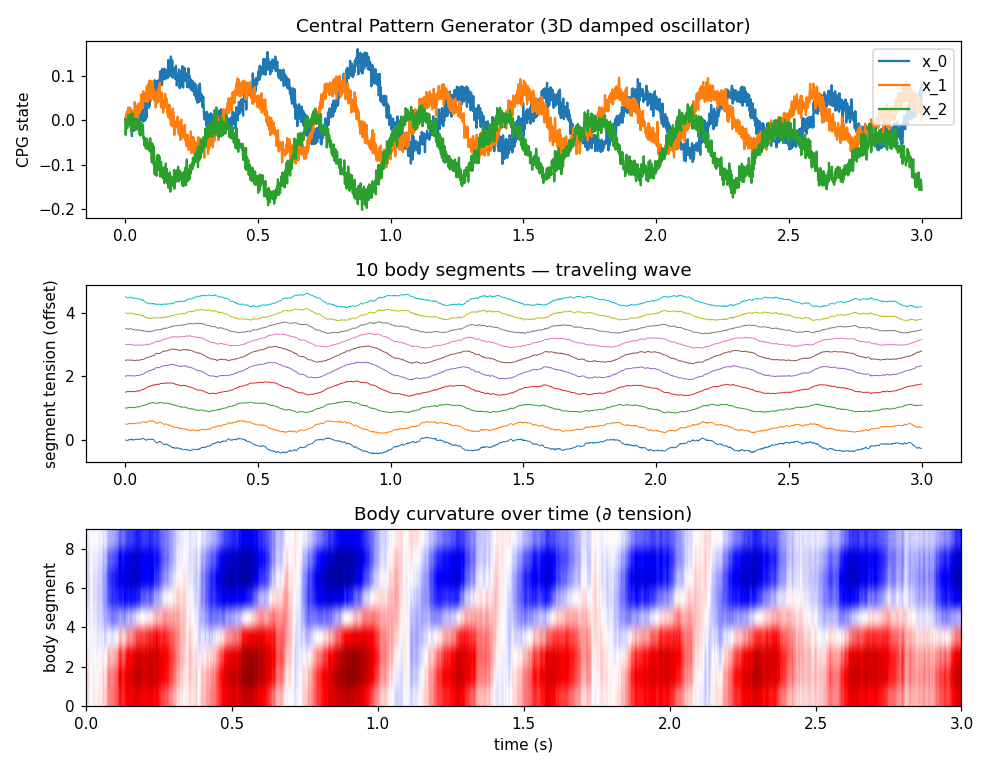
Headline output of the lamprey CPG model.
Top: the 3D state of the central-pattern-generator ensemble — a stable limit cycle around the origin once kicked off near t = 0.
Middle: the 10 muscle-segment tensions decoded from the CPG state, visibly phase-shifted to produce a traveling wave.
Bottom: body curvature as a heatmap over time — the diagonal red/blue bands are the same traveling wave seen in the segment tensions.
Generated by examples/run.py.